Desain Sistem Tertanam Grafis Memberdayakan Life Saving Spider Robots – Laba-laba robot berkaki enam dirancang untuk beroperasi di lingkungan yang keras dan kasar dengan tingkat kebebasan tertinggi untuk mobilitas terbaik.
Desain Sistem Tertanam Grafis Memberdayakan Life Saving Spider Robots
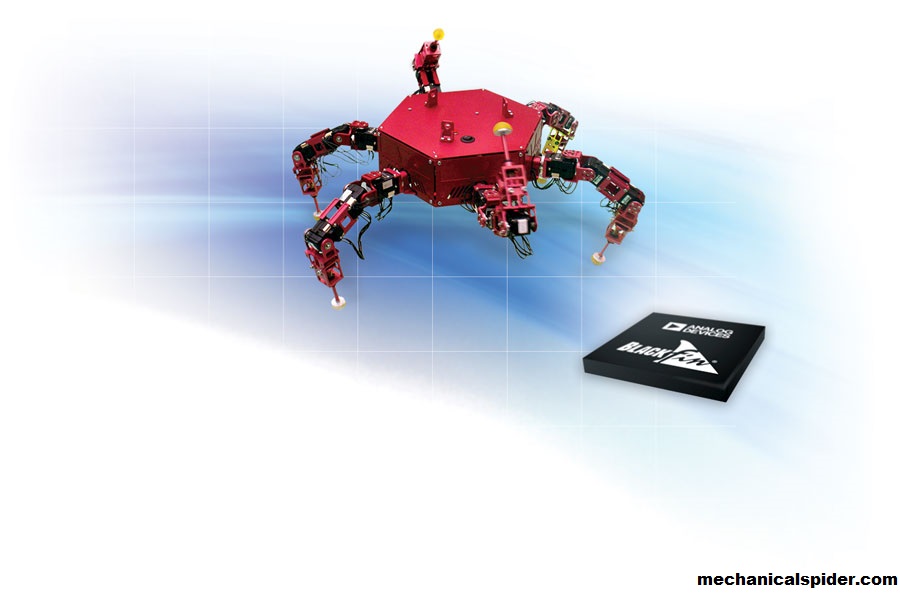
mechanicalspider – Risiko pengembangan rendah, fungsionalitas tertinggi, dan perangkat lunak tertanam yang cerdas digabungkan dengan metodologi desain baru dan unik, menggabungkan pemrograman grafis dengan kinerja pemrosesan komputasi tinggi dan skema energi ultralow. Teknologi utama meliputi prosesor Blackfin ® , Modul Tertanam NI LabVIEW ® untuk Prosesor Blackfin, dan platform sinyal campuran ZMobile ® .
Baca Juga : Robotika Dalam Bisnis: Semua Yang Perlu Diketahui Manusia
Dirancang untuk Misi di Lingkungan yang Kasar
Tujuan utama dari setiap peralatan penyelamatan jiwa adalah untuk melindungi dari hilangnya nyawa manusia tambahan, sambil menemukan korban secepat mungkin. Dengan pemikiran ini, pengembangan robot laba-laba berkaki enam untuk mendukung operasi penyelamatan selama misi bencana, seperti runtuhnya bangunan setelah gempa bumi, diselesaikan untuk memberdayakan solusi robot yang lengkap.
Berkat mobilitasnya, ukurannya yang kecil, dan kecerdasannya, laba-laba ini dapat menghindari berbagai rintangan dan memasuki lokasi yang sulit dijangkau untuk mencari korban yang terperangkap. Menggantikan manusia dalam misi berbahaya (misalnya, menyapu dan menetralisir ladang ranjau) adalah area aplikasi potensial lainnya. Tantangan-tantangan ini dipenuhi oleh skema jalan kaki yang sangat mobile.
Enam kaki independen memungkinkan robot untuk bergerak ke segala arah, bahkan di medan di mana gerakan robot biasanya tidak memungkinkan atau berisiko. “Berjalan” dan “berputar” termasuk dalam pola gerak dasar tingkat tinggi dan telah diadopsi dari serangga berkaki enam. Tiga “kaki” yang bergerak dan tiga yang terangkat memungkinkan kecepatan berjalan yang diinginkan, memberikan keseimbangan yang cukup yang diperlukan untuk medan yang berat. “Merayap” adalah gerakan khusus yang memungkinkan robot untuk masuk melalui ruang sempit dan celah sempit.
Sistem Mekatronika Multifungsi
Mekanika kaki dan kontrol gerak adalah fitur utama dari robot laba-laba. Sebanyak 24 motor sikat dc pintar tidak hanya menggerakkan kaki tetapi juga berfungsi sebagai sambungan integral dari mekanik berjalan. Ini mengarah pada konstruksi yang kokoh namun ringan, mengurangi konsumsi daya dan meningkatkan dinamika gerak.
Selain kakinya, robot hexapod menampilkan subsistem robot otonom yang khas, termasuk visi mesin, pengukuran jarak, dan komunikasi nirkabel. Perangkat keras tertanam dan dua baterai polimer lithium 7,2 V, termasuk pengukur bahan bakar, berada di badan robot yang kaku. Parameter misi, pengaturan I/O, dan langkah gerak baru dapat ditransfer secara nirkabel atau melalui media yang dapat dipindahkan.
Gerakan Cerdas dengan 24 Derajat Kebebasan (24DOF)
Pergerakan tingkat rendah laba-laba bergantung pada model matematika kompleks yang dihitung saat runtime. Berkat daya komputasi tertanam yang sangat besar dari prosesor Analog Devices Blackfin dan layanan real-time deterministik Schmid Engineering, gerakannya terlihat tegas, dinamis, dan halus. LabVIEW VI tingkat tinggi (instrumen vertikal), serta pustaka matematika Blackfin yang dioptimalkan dengan tangan, digunakan untuk algoritme kinematika terbalik yang terus berjalan.
Algoritme ini, termasuk fungsi trigonometri dan operasi matriks, menemukan sudut sambungan yang sesuai, ϴ 1 dan ϴ 2 , untuk menggerakkan efektor ujung secara tepat sepanjang lintasan yang diinginkan dalam ruang (X, Y, Z). Bergantung pada pola gerakan tingkat tinggi, vektor lintasan bergerak di sepanjang garis, persegi panjang, atau lingkaran yang dihitung.
Lintasan dapat diprogram dalam tiga cara berbeda:
- Mengajar dan pemutaran sebagai teknik umum untuk merancang dan melatih pola baru atau khusus
- Perangkat lunak CAD 3D memungkinkan untuk memeriksa lintasan yang disimulasikan secara visual. Model diekspor sebagai file realitas virtual dan diimpor dalam kontrol gambar LabVIEW. Gerakan sekarang disetel dengan membandingkan model virtual dengan model nyata.
- Lintasan yang dihitung terus menerus saat runtime oleh algoritma kinematik terbalik.
Ini dilakukan secara paralel untuk semua sudut sambungan dari keenam kaki, menghasilkan 24 setpoint yang dihitung secara terus-menerus untuk semua motor untuk memastikan gerakan dinamis. Setpoint ini ditransfer ke masing-masing motor melalui jaringan serial RS-485 dan diubah menjadi aksi fisik oleh pengontrol PD desentral.
Umpan balik posisi dan pembacaan suhu dari semua 24 aktuator diperoleh melalui jaringan yang sama. Tarian limbo terkenal yang dilakukan kedua robot secara bersamaan di kompetisi robot Singapura menunjukkan kemampuan gerakan yang luar biasa.
Penglihatan Cerdas dan Penginderaan Jarak Jauh
Di luar gerakan cerdas dan kebebasan bergerak, kamera cerdas dan sensor pengukur jarak ditampilkan di “mata” robot laba-laba. Objek dan substansi dilokalkan dan dilacak oleh algoritme pemrosesan gambar berkinerja tinggi seperti menemukan pusat massa dalam wilayah yang diminati.
“Mata” juga dapat diprogram untuk mengidentifikasi warna apa pun di sekitarnya. Versi mendatang akan menyertakan pemrosesan gambar yang lebih baik, pencocokan pola, dan deteksi tepi: memanfaatkan daya komputasi prosesor Blackfin dan akuisisi gambar berkecepatan tinggi untuk membawa smart vision ke level selanjutnya.
Komunikasi Nirkabel dengan Bluetooth
Memberikan kemampuan untuk berkomunikasi pada level apa pun dengan robot, antarmuka komunikasi Bluetooth nirkabel permanen dipertahankan dengan “dunia luar”:
- Saluran debug untuk Mode Debug Cepat ZMobile selama pengembangan dan pengujian.
- Membaca parameter penting seperti status motor dan level baterai untuk diagnostik sistem. Akuisisi online variabel algoritme vital untuk penyetelan.
- Mengunduh data misi baru sebelum operasi.
Selama kompetisi robotika, dua laba-laba robot dihubungkan melalui saluran komunikasi nirkabel untuk menyinkronkan gerakan mereka. Ini adalah prototipe untuk skenario yang lebih serius di mana beberapa robot laba-laba diberi tugas untuk diselesaikan sebagai sebuah tim.
Perangkat Keras Tertanam ZMobile Berdaya Rendah
Modul ZMobile sinyal campuran ultralow power adalah “jantung” dari robot laba-laba. Modul ini, ditenagai oleh prosesor Blackfin dan LabVIEW Embedded, disediakan oleh penyedia solusi Swiss, Schmid Engineering. Mengintegrasikan sensor, aktuator, penglihatan, baterai, dan komunikasi nirkabel pada satu platform. Nanyang Polytechnic memilih platform ZMobile karena tiga alasan:
Pertama, memprogram laba-laba di LabVIEW memungkinkan para perancang robot untuk berkonsentrasi pada fungsi utama proyek canggih ini sejak hari pertama. Berkat produktivitas tinggi dari pemrograman grafis, para insinyur sistem dapat menambahkan lebih banyak fungsionalitas daripada yang ditentukan sebelumnya selama periode pengembangan yang sama.
Kedua, skema energi ultralow, seperti manajemen daya dinamis ZMobile, merupakan fitur penting untuk robot otonom ini karena waktu pengoperasian sekarang dapat diperpanjang secara signifikan.
Hal yang sama berlaku untuk konsumsi daya modul ZMobile, yang berada dalam kisaran miliwatt, memungkinkan sebagian besar sisa energi yang disimpan dalam baterai on-board digunakan oleh motor. Ketiga, slot I/O proses yang dapat diskalakan memberikan ruang untuk mengintegrasikan lebih banyak sensor dan aktuator di masa mendatang.
Perangkat Lunak Tertanam Grafis Waktu Nyata
Seluruh perangkat lunak aplikasi robot laba-laba diprogram menggunakan LabVIEW Embedded Module for Blackfin Processors 2.5, yang diperluas oleh ZBrain BSP untuk NI LabVIEW dari Schmid Engineering. Ini memberikan platform perangkat lunak tertanam yang ideal yang menyediakan pemrograman tingkat tinggi, debugging grafis, multitasking grafis, dan, pada saat yang sama, perilaku real-time deterministik.
Pola desain berorientasi objek membantu mengelola kompleksitas lebih lanjut pada tingkat grafis. Objek utama, seperti motor atau sensor, diabstraksikan oleh variabel global fungsional, yang mewakili kelas di LabVIEW.
Kerangka aplikasi utama terdiri dari beberapa tugas:
- Loop utama tingkat atas merencanakan tindakan dan diwakili oleh mesin negara klasik yang terhubung ke loop lain dengan antrian perangkat lunak dan sarana sinkronisasi, seperti semafor.
- Tugas komunikasi mempertahankan koneksi data nirkabel ke dunia luar.
- Tugas penglihatan bertanggung jawab atas pemrosesan gambar tingkat rendah dan pembacaan jarak jauh.
- Tugas gerak mengelola pola gerak tingkat tinggi dan kontrol ekstremitas tingkat rendah, dan juga memantau posisi dan keadaan motor.
- Tugas tata graha bertindak sebagai penangan kesalahan umum. Peristiwa dan kesalahan terdeteksi dan dicatat ke media yang dapat dilepas bersama dengan stempel waktu untuk pengambilan nanti. Fitur-fitur ZMobile seperti watchdog, reboot, dan shutdown dengan program wake-up adalah cara yang efisien untuk memulai ulang dari awal jika koreksi kesalahan sendiri (misalnya, rollback kesalahan) tidak berhasil.
Loop ini berjalan secara bersamaan sebagai utas dalam lingkungan multitasking yang kooperatif. Pengalihan konteks dalam kisaran milidetik dan determinisme waktu nyata mikrodetik pada tingkat pengemudi memastikan pergerakan yang mulus dan bebas kesalahan.
Akhirnya, permintaan paralelisme berat untuk keamanan thread dari setiap komponen perangkat lunak dan driver perangkat dipenuhi oleh paket dukungan dewan pembuat.
Kesimpulan
Proyek pembuatan robot yang kuat dan unggul telah berhasil dan waktu pengembangan sangat berkurang berkat model pemrograman grafis menggunakan LabVIEW Embedded Module untuk Prosesor Blackfin dan performa prosesor yang tinggi dari prosesor Blackfin. Mode Debug Cepat grafis Schmid Engineering ternyata menjadi pendorong lain selama rekayasa algoritme, mempersingkat waktu pengembangan dengan faktor lima.
Oleh karena itu, modul ZMobile dapat dianggap sebagai “produk pembunuh” untuk rekayasa sistem tertanam yang mudah digunakan, tidak hanya untuk perancang robot tetapi juga untuk siapa saja yang membangun sistem mekatronika. Kemajuan dalam visi, manajemen daya yang lebih cerdas dan skema pemanenan energi, fusi sensor, logika fuzzy, dan pengumpulan data GPS merupakan komponen yang menjanjikan untuk ditambahkan ke platform mekatronika umum. Lebih jauh,




